
Source from : http://elm-chan.org/works/ltc/report.html
Robot line follower termasuk kedalam kategori robot autonomous yang bergerak dengan mengikuti garis yang ada di permukaan. Prinsip kerja robot Line Follower dapat dideskripsikan sbb :
Pertama
Dapatkan posisi garis melalui sensor yang diletakkan di bagian depan bawah robot. Sensor yang dipakai biasanya photo reflector, yang dipasang dua atau lebih dibagian depan bawah robot Line Follower. Ada juga yang menggunakan kamera (atau image sensor) agar resolusi pembacaan garis lebih tinggi, sehingga menjadikan gerakan robot lebih akurat.
Kedua
Setelah mendapatkan posisi garis terhadap badan robot (yang diwakili oleh sensor), gerakkan (atau putar) motor mengikuti arah garis tersebut. Proses ini hanya mengatur kecepatan rotasi masing-masing motor, agar dapat melakukan gerakan seperti yang diinginkan. Namun untuk robot line follower yang memiliki kecepatan cukup tinggi, beberapa algoritma control perlu diterapkan, agar robot dapat berjalan mulus. Kontrol itu bisa berupa continous control, PID, puzzy logic, atau yang lainnya.
Ketiga
Atur kecepatan, terutama bila menghadapi pergantian lintasan, dari lintasan lurus ke tikungan atau sebaliknya dari tikungan ke lintasan yang lurus.
Ada 2 mekanisme track / jalan yang digunakan, pertama garis putih pada permukaan yang hitam, atau sebaliknya, garis hitam pada permukaan putih. Namun yang lebih banyak digunakan adalah track jenis ke-2 (garis hitam pada permukaan putih)
Untuk mendapatkan robot line follower yang super cepat, maka perlu diperhitungkan bentuk dan kontrol yang digunakan. Harus diusahakan bentuk yang secompact mungkin, dengan kontrol yang setepat mungkin. Mini Line Follower ini cukup menarik untuk dicoba. Si pembuatnya sendiri (mr. Chan) menyebutkan sebagai Desktop Line Follower.

Material Mini Line Follower ini terdiri dari :
- Otaknya menggunakan ATMega8 buatan Atmel
- 6 buah photo-reflektor sebagai sensor garis
- 2 buah motor mini
- 2 buah rubber tire dengan diameter 7 mm sebagai kemudi
- 1 buah free wheel (roda tanpa motor) dengan diameter 5 mm
- 2 buah baterai kancing (@3 Volt) beserta rumahnya
- Kristal 8Mhz
- Papan PCB berlubang
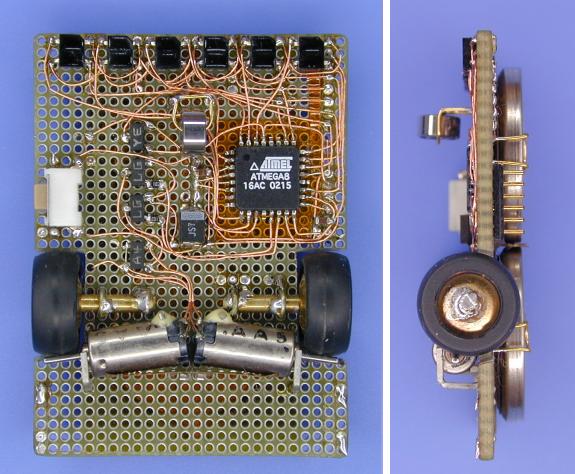
Keterangan : Poros motor langsung bersentuhan dengan karet ban sehingga tidak memerlukan lagi gear. Untuk mengatur kecepatan motor digunakan teknik PWM agar mencapai linearitas putaran.
Pengaturan PWM pada mini line follower ini menggunakan metoda kontrol yang cukup banyak digunakan yaitu kontrol PID (walaupun konstanta Integral diberi nilai 0, artinya tidak digunakan). Pembuatnya sendiri mencoba membandingkan Desktop Line Follower antara menggunakan kontrol P saja dengan menggunakan gabungan kontrol P dan D. Hasilnya dapat dilihat pada video dibawah ini, bahwa kontrol PD dapat membuat jalannya mini line follower menjadi sangat mulus dengan kecepatan yang cepat.
Skematik rangkaiannya adalah sebagai berikut :

Mekanisme pembacaan ke-6 sensornya adalah sebagai berikut :

Titik offsetnya outputnya berada pada 640, pada saat garis hitam yang lebarnya 5 mm berada pada tengah-tengah sensor, yaitu antara sensor 3 dan sensor 4. Jika sudah bisa didapatkan nilai yang linear seperti ini, maka untuk memprogramnya menjadi tidak rumit.
Kontrol PID


ABDIN said:
saya sangat kagum karena ukurannya sangat kecil tapi bagaimana dengan daya tahan batterai
____________________________________________________________
InsanSains says : Karena itu hanya menggunakan baterai kancing biasa, jadi tidak lebih dari 15-30 menit nonstop. Tergantung dari motor yang digunakan juga.
yulius said:
cm mau tanya gmn dengan tenaga dan kecepatannya???????????????apakah kuat di tanjakan dan cukup cepat di jalan datar??????
____________________________________________________________
InsanSains says : dengan motor type tiny pager motor yang rpmnya 31900, ups cepetkan. Tapi kenyataannya tidak segini rpmnya sebab direduksi dengan perbandingan diameter rotor dan ban, sehingga menimbulkan torsi. Saya sendiri belum ngitung berapa besar torsi atau tenaganya. Tapi seharusnya sih bisa lah untuk dipake nanjak pada lintasan yang bersudut 10 derajat-an.
cahyo said:
keren boss..
mo tanya-tanya boleh gak boss??
saya mo buat robot line follower tapi dengan sensor camera, untuk skripsi nih boss. mohon bantuannya.
thanks..
__________________________________________________________________
InsanSains says : ho..ho.. harus belajar image processing dulu negh! ^_^ Keren abiz euy skripsinya.
cahyo said:
balas ke email boss
thanks
umar said:
maz, critanya saya juga mo buat line follower buat TA. mohon referensi tentang PWM-nya ya… 🙂
jazakaAllah khoiron.
__________________________________________________________________
InsanSains says : wa iyakum. Baik insyaAllah, ditunggu saja posting-an tentang PWMnya. InsyaAllah nanti di forward juga ke emailnya. Sukses ya tugas akhirnya
budi said:
assalamualaikum wr.wb
mau numpang nanya2 tentang line follower??
klo misalnya ada tikungan yang tajam itu algoritmanya seperti apa ya mas? trus klo ada perempatan ato pertigaan gmana? dan yang terakhir klo ada garis yang putus2 gmana?
trima kasih mas..
wassalamualikum wr.wb
__________________________________________________________________
InsanSains says : ^_^ Wa alaikum salam wr. wb.
Kalau saya sih yang gampang-gampang aja ngambil algoritmanya. Si robot saya suruh nyimpan gerakan selama membaca garis. Nah ketika ketemu garis putus-putus, si robot diperintah supaya melakukan gerakan sebelumnya (yg ada dimemory). Jadi mau putus-putusnya garis lurus kek, belok ke! Gak ada masalah!
Ok.. Thanks juga! Wass
munawar said:
sy ada kndl ni dlm pmbuatan proyek robot mikrokontroller…
__________________________________________________________________
InsanSains says : ^_^ Di share saja siapa tahu, nanti ada yang bisa membantu. Atau mau ikutan di forum http://solderen.co.nr supaya lebih nambah wawasan. Thx
ali za said:
asss… mas sya masih pemula…
udah lama mau bt tp gagal trusss…
bisa tunjukin skematik line folower menggunakan atmega8535…???
langgsung di kirim ke email..
thakns before…. wasss
__________________________________________________________________
InsanSains says : ^_^ Anda bisa download skematik dan tutorialnya di forum http://solderen.co.nr Saya tunggu yach!! ^_^
akbar said:
mas tolong dong saya dibantu…saya sudah buat robot line trakking tapi jalannya masih kurang mulus soalnya saya belum menggunakan kontrol PID dalam programnya…tolong dong saya bagaimana caranya masukin kontrol PID dalam programnya…makasi ya mass,,,
__________________________________________________________________
InsanSains says : ^_^ InsyaAllah nanti saya post atau sediakan file untuk bisa di download berisi materi PID mikrokontroler.
dewan said:
mas tolong berikan refrensi saya untuk mudah membuat robot dari yang paling mudah
feriza said:
Ass,,,sebelumnya salam kenal yak,,
mas qu mo minta tolong neh ,,qu lg kbingungan bwt line follower dengan PID kontroler,,,micro yg digunakan ATmega 8535,, sensor yg digunakan paduan LDR dgn LED superbright,,yg mana jumlahnya 8 buah sensor yang terpasang seperti panah,,
input micro berupa pembacaan sensor yg di compare komparator,,
klo blh mnt tolong, qu mnt tolong cara konversi PID ke algoritma programnya,,,
Sebelum n sesudahnya i’m ucapkeun matur tengkyu yak mas,,,
pls bls ke e-mail qu(wongedan86@yahoo.com)
thanx mas!!!
^_^
__________________________________________________________________
InsanSains says : ^_^ mirip panah?
*gak mudeng…!
Yang jelas, apapun posisinya akan lebih baik bila tetap memperhatikan derajat perubahan posisinya, supaya resolusi pembacaan sensornya lebih akurat.
Untuk masalah PID nanti saya coba post. Tapi kalau saudara terburu-buru nanti saya kirimkan beberapa artikel yang cukup mudah untuk memahaminya. Trima kasih sudah berkunjung
Fyndi said:
Ass.Mas,salam kenal dari saya,saya mo nanya nih,yaitu mengenai prinsip konversi logika PID ke mikro gimana ya?Saya masih belumjelas e untuk masalah itu,kalo mas ga merasa keberatan saya dikirimi ke emailku tutorial singkatnya ma contoh progamnya kalo bisa.Thanks sblmnya.w3
__________________________________________________________________
InsanSains says : ^_^ Wah.. beberapa comment minggu ini banyak yang bertanya tentang PID. Sekali lagi, mohon maaf belum bisa saya post. Jika saudara memang memerlukannya mendesak, saya ada beberapa artikel yang cukup menarik dan gampang dicerna (walaupun dalam bahasa Inggris). Nanti saya kirim via email yach. Sekali lagi mohon maaf.
*Orangnya lagi kejar tayang buat ngerjain proyek
Didit said:
Sepertinya menggunakan PCB bolong yang double layer,dimana saya bisa mendapatkannya?klo menggunakan metida PID apakah dia bisa berbelok tepat 90 derajat?mana yang lebih baik menggunakan metoda PID atau PWM?
__________________________________________________________________
InsanSains says : ^_^ Situs maupun toko elektronikanya sudah saya share. tinggal saudara klik maupun dateng langsung kseana.
PID dan PWM tidak bisa dibandingkan, sebab keduanya merupakan dua hal yang berbeda. Kapan-kapan insyaAllah saya ulas. Trima kasih sudah berkunjung
rezha skagata vero said:
aku arep nggawe ika, truz tak kekke bapekne B3X1. Ckakak!
Kowe jan ramudeng aky tenan to? ^_^
rama said:
mas aku lagi bingung, itu konversi PID nya ke algoritma gmana ya, itu motor nya, servo atau motor DC biasa, tolong bantu ya mas, maksih, klao bs kirim ke email saya, maksih mas
Agus said:
Setau saya kontrol terdiri dri high level dan low level kontrol, dan pada robot biasany pid dgunakan d low level kontrol yaitu untuk memastikan kecepatan motor yg dbrikan(setting point) sesuai dgn nilai kecepatn motor sebenarny (present value). Untuk pemprogramany kita bsa mengknversi pid analog ke dlam pid digitalnya.Namun akhr2 ini saya pnah mbca klo pid dgunakan d high level kontrol, yg mana outputny berupa steering dan kcepatan. Nah bgaimana mas cra membuat persamaany pid sbgai steering dan kcepatan, bingungs oiy,.. Mas bisa bntu ga, karena sya lg cb bkin robot wall folower dgn pid, mhon pncerahan mas.. Tlong krimin jga artikel pid ny k email sya mas. Mhatur suwun..
al_amin said:
bos insan…ku lagi kebingungan cari literatur pid line follower nich.bisa minta algoritma untuk program c nya,nggak.plus kupas tuntas pembahasan pid untuk line follower .sing lengkapya boss…coz browsing 24jamx20 hari tetep mumet nggak mudeng. & klo bisa dijelasin basic rumus algoritmanya..kirim ke email aku boss..thanks before..moga tambah ramai linknya
Danang said:
Duh maap agak menyimpang.. Bisa minta tolong ga.. Aku punya modul 8535.. Trus pengen bikin TA temanya networking bisa ga tuh dipake..? Thx b4.
asep rudini said:
ass…
mana programnya……..??????????
boleh minta program mini line follower gak……???????
soalnya tugas akhir sekolah saya susah…..
wass…….
thelda said:
hai mas,,
aq mau minta program mini followernya,,,
aq udh tahu rangkaianx 4 buat cuman, aq agk bingung mslh programx..
makax aq pengen belajar programx lagi
makasih sebelumnya…
choi said:
wah mas, saya minta ilmu dari mas ya. klo punya waktu, luangkan buat ngirim artikel ke email saya di assalamtech@yahoo.co.id ya… terima kasih atas perhatiannya..
3Q said:
Pa mo tanya donk. cara milih mikrokontroler gimana sih? gw uda coba baca2 spec dari atmel ny ada brp chanel ADC brp chanel bla bla bla tapi gw bingung cara milih nya gimana.
klo bisa sekalian minta referensi buat belajar dari dasar nya dulu..
thx b4….
Nicholai elektro uksw 2008 said:
Mas,, itu Line followernya aq mau bkin pke yng digital biasa bukan PMW krn qt blm dpt mta kuliah DDP, soalnya agktn bru 2008,, TR nya srh bkin line follower ini…
j mas klo sensornya 4 bsa kn??? Tpi agk rmit sich,,,
donny said:
mas..tolong berikan program yang lengkap untuk robot mini line follower..
re3 said:
ga pake list program ya? tinggal rakit truz jalan? mohon pencerahanya…
ALYE MAKRUSE said:
mas ku minta softwarenya donk. key…. buat Ic atmega tuuu
ihsan said:
siiip…ane jadi kepengen buat line follower juga niy….
Agung's said:
boss,penjelasannya udah oke tuh.kebetulan saya masih tingkat 1 nih.masih belum begitu ngerti tentang line follower.tapi saya juga bantu-bantu tingkat tiga yang bakalan ikut KRCI di UI.Kasih yang detilnya dari awal boleh gk tuh???jadi sambil bantuin saya juga bisa ngerti jg melalui ente gtu.thx b4!!1!^^
linke said:
mas,,saya mau nanya,,kira2 rangkaian sensornya, selain yang di atas masi ada lagi g??soalnya kemaren pas saya coba masih kurang pas tegangan outputnya?
rendy said:
Mau tanya, bagaimana algoritma programnya jika saya menggunakan C++? Berapa kisaran biaya yang diperlukan?
Terima kasih.
yaddi said:
di indonesia jarang ada web atau blog yang membahas ttg elektronika, microcontroller dan robot. saya jadi pengen bikin satu.
AFFAN said:
Assalamu’alaikum,
mas mau tanya ni,
cari nilai errornya pake program PID gmana ya?
aq udah dpet referensi ada 2 cara mencari errornya, cara keduanya berbeda, saya jadi bingung.
DIYON said:
Assalamu’alaikum,
mas boleh minta algoritmanya yang menggunakan C++ gak…???email saya; diyon_1988@yahoo.com
thanks….
DIYON said:
mas progaram buat ATML8 gemana??
saya baru mau mulai terjun dalam dunia microcontroler jadi belum begitu tau…??mohon bantuannya mas??
diyon_1988@yahoo.com
terimakasih….good luck selalu???
aji said:
boleh minta algoritmanya??? bales ke email aja bos. makasih.
Adi said:
Mas saya minat banget di dunia robot. bisa kasih tau dari awal sampai akhir g???
Biaya kira2 abis berapa??
Ke email saya y mas a_dieone@yahoo.co.id
Makasih banyak. ditunggu infonya
noor hanif said:
mas,untuk programnya gmn???
kl bleh tau tlong kirim k email saya y, hanief_nooer@yahoo.com
trimaksih byak mas…….
noor arista said:
artikel yg sangat menarik mas,, 😀 😀
tlong kirim k email saya y, konsep PID nya
m4L3_bug5@yahoo.com
Semoga Ilmux bermanfaat, terima kasih wasslam 😀
Katonbae said:
wahhh mantapppp
tapi msih bingung
ada scrip programnya ga mass
sama software isp na sekalian bwat atmega8
kirim k email q dunk cindil_cemendil@yahoo.com
matur nuwun
danang said:
kalo flow chart buat sensornya gmn???
Al Habsyi said:
cumka mau tanya aja,,,
apa kita bisa buat helikopter yang bisa mengikuti jalur ???
supralova said:
mas, boleh saya minta program PD nya?
Trims…
fahmi said:
kalo bisa yang detile mas, sama list programnya biar langsung turn on…
badru said:
mas.tolong yah saya minta program PID-nya soalnya saya ada tugas bikin robot LF,tolong kirim ke e-mail saya ya (ru_ajip@yahoo.com)
makasiiih mas:)
SAKTYA said:
maz… dimana yach saya bsa dapatkan informasi line follower yang lenkap bgta?
ada gak forum untuk gabung di komunitas untuk pengila robotika..
thanks……..
sopiyana gumilar said:
wah…artikel di blog ku juga sama nih…rancangan robot…
anto said:
Assalaamu’alaikum
Pak, saya masih bingung tentang bagaimana memasukkan PID control ke dalam mikrokontroler AVR ATMEGA8535. bisa tidak kalo bapak buat tutorialnya program mikro dengan PID….
Kalau ada artikel tentang PID untuk mikro bisa imel saya pak…
Makasih.
agus didi said:
asslm.mas tolonng kirimin aku semua modul dan penjelasan pembutan robot line follower lewat emailku ya…..
wassalam.
Imanuel said:
apa ada lagi rangkaian robot line follower,selain yg ini?.Terima Kasih.
ridho said:
mas saya mau buat TA ttg line follower, selain pake kontrol PID n fuzzy logic pake apa lagi mas ???
mohon bantuannya …
adiank said:
mas boleh minta skrip program pid untuk mini line follower diatas gk????
tlg yah mas…
yoadIANG@YAHOO.COM
ATO POST KAN AJA MAS..
HEHEHE
THX
Hanejy said:
Makasih
amat bermanfaat bagi pemula
dwi said:
wuih ,,.,.,??!!!! kereeeeeeen
bisa kirimin program nya ga’???
pleasee
dwi said:
boozz bsa krimin programnya nggak???? and memprogramnya pkai sofware and bahasa apa???
bayuprasetyo said:
bos, punya line follower yang selain ini gak?
kalo punya w minta dong
thanks ya
kirim ke email w
*.*
nama said:
yang lengkap disini neh
http://elm-chan.org/works/ltc/report.html
== TECHNOKIT ==
Ping-balik: 2010 in review « Insan Sains Projects
Iswanto said:
Bagus artikelnya
Crisna said:
bozz, saya ada kendala dalam perakitan dan peralatannya, tolong dibantu…
lewat e-mail saja ya balesnya…
koreanbest_person said:
Himpunan Mahasiswa Elektronika dan Instrumentasi (HMEI) UGM, mengadakan ELINS Lomba Robot Line Follower Competition (EBOTEC)
yang diadakan pada 1 mei 2011.
Kompetisi ini ditujukan khususnya untuk pelajar SMA/sederajat dan mahasiswa S1/D4//D3/D2/D1 dari seluruh Indonesia. Dengan tema “Robotics for Better Generation”.
Untuk informasi lebih lanjut dapat mengakses web
ebotec.hmei.elins.org
trims
riezal said:
om om… mana program buat robotnya??
dusa said:
mas lo nilai kp kd d program mini line follower ni brpa nilai’a? biar smooth jlan’a??
muhammad hanry said:
askum mas…mas q mau tnya…konfigurasinya kaki pada robot berkaki itu gmna mas…soalnya q mau terapkan di line followerku…mnta bntuannya ya….kirim ke e-mailku aja ya mas…. muhammad_hanry@yahoo.co.id
thanks
Luthfan Fikri Zul Fauzi said:
nice post,
kreatif banget…
boleh minta program buat atmel nya mas? ke luthfanfauzi@gmail.com
thanks
adil vitra said:
mas ada rangkaian yang lain g/
andre said:
mas say a juga mw tanya gmana cra bwt line follwer tpi gk pake at mega….
makash mas………
nDan Beibeck said:
Reblogged this on nDanBeebeck Blog.
Fakhri Apriansyah said:
keren mas robotnya 😀
saya mau minta schematic dan algoritma programnya pake bahasa C dong mas. 😀
Fakhri Apriansyah said:
keren mas robotnya
saya mau minta schematic dan algoritma programnya pake bahasa C dong mas.
ini email saya mas, fakhriaprian@yahoo.com
fadhli aziz said:
Agan program di mikrocontrolernya pake bahasa apa????
kalau bisa korimin ke e-mail ane ya gan
aziz_fadhli@yahoo.com
ditunggu ya gan
Walter said:
halo, pekerjaan yang baik, Anda dapat membuat beberapa robot, dan menjualnya kepada saya?
ilik said:
mas kalo tanya buat line tracer bisa gak?